

Несмотря на развитие самых фантастических технических средств, особенно в среде потребительских товаров, средства количественных измерений различных явлений природы демонстрируют весьма сильный консерватизм. Объясняется это тем, что любое измерение предполагает наличие метрологического обеспечения, т.е. периодической поверки показаний измерителя с помощью официально утвержденных метрологических схем и эталонов [1]. Применительно к вновь создаваемым измерительным средствам это выливается в большие дополнительные расходы, незаметные конечному пользователю, который зачастую и не понимает, почему точные измерения обходятся дорого. К средствам in situ измерений для морских экспедиционных условий предъявляются особо жесткие требования. Это компактность, легкость, нежелательность метрологической поверки в процессе экспедиции, далекие от лабораторных условия работы (температура, давление на глубине, агрессивность морской воды и т.п.). Сложилась устойчивая практика in situ контактных измерений с помощью погружаемых многоканальных измерительных зондов [2]. Ключевой элемент для каждого измеряемого параметра это измерительный канал, т.е. устройство, преобразующее эту величину в аналоговый или цифровой электрический сигнал. Ранее автор участвовал в создании специального технологического средства для отладки и испытаний новых измерительных каналов [4, 5]. Статья посвящена разработке методики натурных испытаний вновь создаваемых каналов в условиях реальных морских экспедиций.
Цель исследования
Целью исследования являлась разработка и экспериментальная апробация методики испытаний вновь создаваемого измерительного канала с использованием созданных ранее специальных технологических средств. Рассмотрим работу с каналом идентификации частиц взвеси.
Материалы и методы исследования
Регистрация и идентификация частиц взвеси является предметом пристального внимания исследователей и разработчиков морских измерительных приборов. Особенный интерес это представляет для работы с зоопланктоном [7]. Были созданы в том числе лазерные теневые регистраторы планктона [3]. Привычно регистрировать планктон по его изображению, хотя это и требует сложных алгоритмов обработки изображений [8]. В данной статье идет речь о канале, основанном именно на обработке изображений частиц. На данном этапе в канале осуществляется регистрация частиц в измерительном объеме различной конфигурации, при этом требуется передача полученных кадров в реальном времени на борт судна по каналу Ethernet 100 Mb с одновременной регистрацией фоновых гидрофизических параметров. Основным средством измерений была измерительно-технологическая платформа (здесь и далее ИТП), содержащая электрическую лебедку, оптико-волоконный кабель-трос, погружаемое устройство (здесь и далее ПУ), судовой кабельный жгут, судовой блок и рабочее место оператора. ПУ состоит из двухэтажной сварной трубчатой титановой рамы цилиндрической формы диаметром 500 мм и высотой 1300 мм [4, 5]. Нижний этаж содержит гидрофизический модуль, выдающий данные датчика давления (глубина погружения), данные CTD-зонда, концентрацию растворенного кислорода. Верхний этаж содержит канал идентификации частиц взвеси и блок связи и питания, транслирующий данные от датчиков через оптико-волоконную и электрическую линию кабель-троса на борт судна, на рабочее место оператора измерений. Внешний вид ПУ представлен в [5], а собственно глубоководный бокс для макросъемки с IP-камерой AV 1310 из состава канала идентификации показан на рис. 1. Экспериментальные регистрации частиц выполнены в двух морских экспедициях: в 2013 году на НИС «Денеб» ЮНЦ РАН [4] и в 2016 году на НИС «Академик Мстислав Келдыш». В обеих экспедициях измерения проводились на определенных станциях с заранее заданными координатами.
Эксперимент № 1
НИС «Денеб». Район проведения работ: Черное море, район свала глубин Анапской банки. Глубина погружения до 328 м. Лебедка устанавливалась на кормовой палубе, кабель-трос заводился через два канифас-блока и боковую стрелу-выстрел.
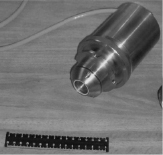
Рис. 1. Внешний вид глубоководного бокса с IP-камерой
В точке станции судно ложилось в дрейф и выполнялись зондирования. Работа с ИТП выполнялась втроем.
Оператор измерений находился в судовой лаборатории, защищенной от погодных условий. Включал питание и записывал фото и видеофайлы с канала идентификации, одновременно записывал гидрофизические данные. Обменивался по рации информацией с оператором лебедки. Для Чёрного моря характерна особенность распределения по глубине растворенного кислорода [6]. В связи с этим особое внимание при зондировании уделялось прохождению границы с нулевой концентрацией растворенного кислорода.
Оператор лебедки управлял спуском и подъемом ПУ. Во взаимодействии по рации с оператором измерений детально изучалось прохождение границы нулевой концентрации кислорода, за счет плавных спусков и подъемов ПУ в этой области
Помощник страховал ПУ от ударов о палубу и борт, следил за положением кабель-троса.
Эксперимент № 2
НИС «Академик Мстислав Келдыш». Район проведения работ: Карское море, глубины до 200 м. Лебедка устанавливалась на кормовой палубе, кабель-трос заводился через оригинальные канифас-блоки большого диаметра с узким шкивом и кронштейн кормовой П-рамы. Во время нахождения на станции судно стояло на якоре с выключенными ходовыми винтами, либо отрабатывало самым малым ходом против ветра во избежание затаскивания кабель-троса под судно в винты. Работа выполнялась также втроем плюс дежурный по каждой станции.
Результаты исследования и их обсуждение
Эксперимент № 1
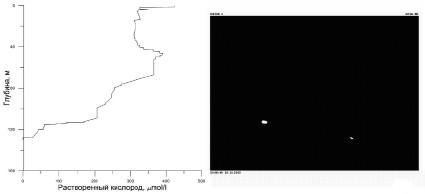
Регистрировались частицы взвеси на станции с максимальной глубиной погружения 328 м с одновременной регистрацией глубины и концентрации растворенного кислорода. График концентрации растворенного кислорода от глубины (до 160 м) приведен на рис. 2, а. Регистрация велась на 17 горизонтах глубин, на каждом делалась выборка из нескольких кадров, разнесенных во времени, кадры обрабатывались в графическом редакторе с целью бинаризации. Размер измерительной камеры 10х10х10 мм. Результат бинаризации приведен на рис. 2, б. Затем визуально подсчитывалось количество частиц в кадрах, результаты для горизонтов около нулевой кислородной границы приведены в таблице. Видно, что частота появления частиц около границы выше, чем выше или ниже её, что подтверждалось ранее акустическими исследованиями. На примере НИС «Денеб» выяснилось, что при работе с ИТП на судне, на котором ранее такие работы не проводились, основное управление ложится на оператора лебедки, который по рации получает информацию с мостика от того, кто в данный момент управляет судном и так же по другой рации от оператора измерений. Это позволяет эффективно и безопасно осуществить зондирования, особенно при работе на судне небольшого водоизмещения (до нескольких сотен тонн), более чувствительного к внешним воздействиям, чем большое НИС.
Частота появления частиц на горизонтах
|
Номер горизонта |
Глубина горизонта, м |
Количество больших частиц в выборке |
Количество малых частиц в выборке |
Общее количество частиц в выборке |
Количество кадров в выборке |
Частота появления частиц (шт/кадр) |
|
6 |
76 |
1 |
1 |
2 |
10 |
0,2 |
|
7 |
80 |
0 |
0 |
0 |
3 |
0 |
|
8 |
87 |
3 |
15 |
18 |
33 |
0,54546 |
|
9 |
121 |
2 |
2 |
4 |
23 |
0,1739 |
|
10 |
165 |
0 |
0 |
0 |
4 |
0 |
|
11 |
177 |
0 |
0 |
0 |
1 |
0 |
Эксперимент № 2
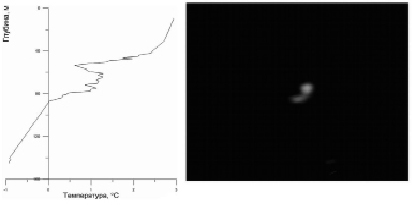
Регистрировались частицы взвеси, причем канал идентификации был модифицирован, измеряемый объем был вынесен за пределы рамы ПУ (см. рис. 2), использовано два осветителя: зеленый и белый, увеличен размер регистрируемого объема 15х15х15 мм. Были получены кадры частиц взвеси в привязке к вертикальным профилям гидрофизических параметров, однако отсутствие резких границ по кислороду и иным показателям не позволило выявить ярко выраженных слоев с высокой концентрацией. График зависимости температуры от глубины на одной из станций приведен на рис. 3, а. Здесь видна характерная для некоторых районов Карского моря отрицательная температура воды летом на определенных глубинах. На рис. 3, б приведен кадр с частицей. К сожалению, малый регистрируемый объем не позволяет эффективно захватывать частицы зоопланктона без использования концентрирующей сети. Однако в процессе экспедиции был опробован метод погружения канала идентификации в емкость с заранее отловленными пробами зоопланктона. Это позволяет регистрировать зоопланктон без использования лабораторного микроскопа. На примере НИС «Академик Мстислав Келдыш» также определилось, что основную нагрузку по управлению измерениями на ИТП несет оператор лебедки, хотя большее водоизмещение (более 6000 т) делает работу более спокойной при внешних возмущениях на корабль. Была опробована установка автономных измерителей на ПУ (например, доплеровского регистратора течений Aquadopp). Работа с регистрацией частиц на кормовой палубе происходила с задержкой по времени после работы планктонологов с сетями на носовой палубе, что желательно исключить.
а б
Рис. 2. а) Зависимость концентрации растворенного кислорода от глубины; б) бинаризованное изображение частиц взвеси на горизонте
а б
Рис. 3. а) график температуры от глубины, б) черно-белый кадр с частицей (глубина 76 м)
Выводы
Предлагаются следующие основные пункты методики работы с ИТП на судне:
1. Определяются характеристики судна, возможные места установки лебедки и прочих элементов ИТП.
2. Прорабатываются виды работ в рейсе по станциям и возможность параллельной работы разной аппаратуры с установкой на ПУ ИТП. Необходимо учесть, что на ПУ имеется резервный разъем для опционального подключения какого-либо устройства с интерфейсом Fast Ethernet 100 Mb и питанием 12 В 0,5 А, что может быть полезно для проведения попутных измерений коллегами из других отрядов.
3. Определяется предварительный сценарий зондирований на станциях, обязанности операторов лебедки и измерений. Следует уделить особое внимание квалификации оператора лебедки, т.к. от грамотности его действий во многом будет зависеть успех испытаний.
4. Определяются габариты испытуемого канала, для его судовой лабораторной отработки подготавливается специальный бак для морской воды.
5. Производится сборка ПУ под испытания соответствующего канала, при этом должна быть обеспечена легкость снятия канала и его погружение в лабораторный бак без отключения от ПУ.
6. Осуществляется монтаж ИТП на судне, разводка всех кабелей, запитка электрических цепей от качественной бортовой сети 220 В 50 Гц (или от грузовой автомобильной аккумуляторной батареи через инвертор, в случае, если судовая сеть низкого качества). Положение бака должно позволять удобную переноску к нему ПУ с подключенным кабель-тросом.
7. Выполняются запланированные работы на станциях.
Данная методика используется при создании и отработке других измерительных средств, в частности погружаемых голографических измерительных систем, созданных в Томском государственном университете.
Библиографическая ссылка
Оленин А.Л. МЕТОДИКА НАТУРНЫХ ИСПЫТАНИЙ НОВЫХ ОКЕАНОЛОГИЧЕСКИХ ИЗМЕРИТЕЛЬНЫХ КАНАЛОВ С ПОМОЩЬЮ ИЗМЕРИТЕЛЬНО-ТЕХНОЛОГИЧЕСКОЙ ПЛАТФОРМЫ // Международный журнал прикладных и фундаментальных исследований. – 2017. – № 10-2. – С. 201-204;URL: https://applied-research.ru/ru/article/view?id=11888 (дата обращения: 20.04.2024).