

Методы глубокого обучения превратили приложения, которые ранее требовали экспертных знаний в области компьютерного и машинного зрения, в инженерные задачи. Глубокое обучение позволило перенести нагрузку от создателей приложений, которые разрабатывают и пишут сценарии алгоритмов, основанных на правилах, на инженеров, обучающих системы. Оно также открыло новые возможности для решений задач, которые никогда не выполнялись без человека. Таким образом, глубокое обучение дало возможность существенно облегчить работу в области машинного зрения, расширяя границы возможностей компьютера и камеры, то есть того, что они могут точным образом изучить.
Классификация изображений является одним из наиболее фундаментальных приложений в области компьютерного зрения. Глубокие модели сверточных нейронных сетей показали наибольшую производительность при работе с изображениями, которая иногда превышает возможности человеческого зрения [1]. Тем не менее даже при этом значительном улучшении все еще приходится сталкиваться с некоторыми проблемами, связанными с переобучением и вымыванием (затуханием) градиента. Для их решения используются некоторые известные методы: аугментация данных, пакетная нормализация и дропаут; современные модели, предназначенные для классификации, не выполняют преобразование цветового пространства исходных цветных изображений, представленных в формате RGB.
Возрастающая актуальность использования различных цветовых пространств для улучшения производительности определяет мотивацию эксперимента, представленного в данной работе.
Цель текущего исследования – изучить влияние цветового пространства в задаче классификации изображений. Для достижения цели набор данных CIFAR-10 будет преобразован в пять других цветовых пространств, а именно HLS, HSV, LUV, LAB, YUV, затем на каждом из них будут обучены две различные модели архитектуры глубокого обучения: ResNet20 [2] и CapsuleNet [3].
Материалы и методы исследования
В последнее время сверточные нейронные сети продемонстрировали существенное улучшение производительности в задачах классификации изображений [4]. Тем не менее в качестве входных данных они принимают наборы изображений в основном в пространстве RGB, хотя существует много других доступных цветовых пространств.
Для достижения цели исследования в работе была рассмотрена архитектура ResNet, занявшая первое место в международном соревновании по классификации 2015 г. [2]. Потребность в этой архитектуре была вызвана тем, что глубокие модели при добавлении слишком большого количества слоев могут показывать худшую точность в том случае, если сходимость сети была достигнута ранее. Таким образом, необходимо было обеспечить оптимальную глубокую сеть.
Архитектура ResNet (сокращение от residual network – рус. «остаточное обучение»). Здесь «остаточная» структура обучения подразумевает проверку соответствия добавляемых новых слоев некоторым «остаточным» слоям, смысл использования которых состоит в том, что, когда модель сети обучается, проще сбросить остаток слоев до нуля и обучить сеть нулю, чем согласовать обучение линейному преобразованию с помощью набора нелинейных слоев. То есть сеть обучается предсказывать функцию F(x) – x вместо функции F(x), а для компенсации этой разницы добавляется так называемое «замыкающее соединение» между слоями «остаточного блока».
Применительно к задаче классификации изображений использование такой архитектуры позволяет решить проблему затухающего градиента, возникающей по причине того, что при дифференцировании по цепному правилу до глубоких слоев нейронной сети доходит небольшая величина градиента (из-за многократного домножения на небольшие величины на предыдущих слоях).
Вторая рассматриваемая архитектура – CapsNet – новая модель капсульной нейронной сети, написанная в результате экспериментов с фреймворком Keras [5], который представляет собой высокоуровневый API нейронных сетей, написанный на Python и способный работать поверх библиотеки глубокого обучения TensorFlow. Капсульная сеть обеспечивает механизм маршрутизации. Она может иметь много слоев, состоящих из капсул. Капсула – это группа нейронов, которые могут выполнять вычисления на своих входах, а затем вычислять выходные данные в форме вектора. Вычисления нейронов внутри капсулы могут представлять различные признаки изображения, такие как размер, положение, деформация, ориентация и т.д. объекта или части объекта, который присутствует на данном изображении. CapsNet использует длину выходного вектора для представления существования объекта. Длина выходного вектора капсулы не может превышать единицу благодаря применению нелинейной функции, которая оставляет направление вектора неизменным, но уменьшает его величину.
CapsNet предлагает включить механизм маршрутизации между двумя слоями капсул. Механизм маршрутизации создает капсулу в одном слое для связи с некоторыми или вообще всеми капсулами в следующем слое.
Следует отметить, что существуют и другие архитектуры, такие как VGG, GoogLeNet, и другие фреймворки, такие как Caffe, Pytorch. Текущий эксперимент сосредоточен на процессорных вычислениях.
Результаты исследования и их обсуждение
Для проведения эксперимента был использован набор данных CIFAR-10 [6], который состоит из 60000 цветных изображений 32x32 десяти классов (самолет, автомобиль, птица, кошка, олень, собака, лягушка, лошадь, корабль и грузовик), по 6000 изображений в каждом классе. Всего имеется 50000 изображений обучающей выборки и 10000 изображений тестовой выборки.
Набор данных был преобразован в различные цветовые пространства так, как показано на рис. 1. Результат преобразования представлен в нижней части изображения.
Используемая в работе модель CIFAR10_ResNet состоит из двадцати слоев – и это модификация модели ResNet20, сохраняющая ту же структуру и свойства. Вид этой модели и ее слоев приведен на рис. 2. Каждый слой ResNet состоит из блоков «обычных» слоев, при этом каждый блок имеет два или три уровня глубины.
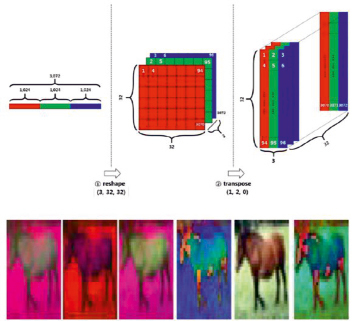
Рис. 1. Преобразование изображения в различные цветовые пространства
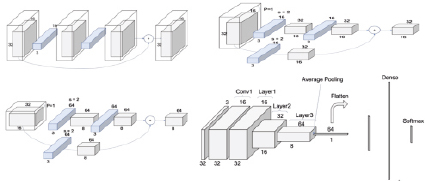
Рис. 2. Модификация ResNet
Структура сети ResNet для набора данных CIFAR-10 состоит из трех ResNet-слоев – здесь слои свертки и пулинга объединены в блоки, причем каждый блок обнаруживает схожее поведение. Слои выполняют свертку 3x3 с фиксированной размерностью карты признаков, минуя входные данные через каждые две свертки. Кроме того, параметры ширины и высоты фильтра свертки, а также каждой из карт признаков остаются постоянными в течение всего слоя. Уменьшение объема данных достигается за счет использования свертки.
В результате проведения экспериментов были получены результаты, показанные в табл. 1. Результаты демонстрируют, что есть небольшое изменение в точности в ResNet20, а также в CapsuleNet, но даже небольшой процент может иметь значение. С другой стороны, цветовое пространство LUV является неплохой альтернативой – оно показывает улучшение на 0,92 % по сравнению с RGB в ResNet20 и 0,39 % в CapsuleNet.
Если взглянуть на результаты точности распознавания по классам моделей CNN ResNet20 и CapsuleNet на тестовом наборе различных цветовых пространств в табл. 2, 3 и 4, можно заметить, что определенное цветовое пространство лучше подходит для конкретного класса конкретной модели, но эта особенность не является постоянной, поскольку ResNet20 меняется на CapsuleNet, или новая модель формируется путем аугментации данных со значительным изменением точности при переходе от одного цветового пространства к другому. Например, для класса корабля (ship) в ResNet20 без аугментации данных самая высокая точность 91,10 % получается при использовании цветового пространства LAB; для ResNet20 с аугментацией самая высокая точность 92,50 % получается с использованием цветового пространства YUV; для CapsuleNet с аугментацией данных самая высокая точность 91,50 % получается с использованием цветового пространства RGB.
Таблица 1
Cравнение точности распознавания на валидационной выборке для разных цветовых пространств набора CIFAR-10 с ResNet20 и CapsuleNet
|
Цветовая модель |
ResNet20 без аугментации, % |
ResNet20 с аугментацией, % |
CapsuleNet с аугментацией, % |
|
RGB |
74,76 |
85,02 |
83,15 |
|
HSL |
73,48 |
83,73 |
81,65 |
|
HSV |
75,12 |
84,81 |
82,56 |
|
LUV |
75,59 |
85,94 |
83,54 |
|
YUV |
75,96 |
85,88 |
83,31 |
|
LAB |
76,52 |
85,66 |
82,94 |
Таблица 2
Cравнение точности по каждому классу набора CIFAR-10 с ResNet20 в различных цветовых пространствах (без аугментации данных)
|
Имя класса |
RGB, % |
HSL, % |
HSV, % |
LUV, % |
YUV, % |
LAB, % |
|
airplane |
78,70 |
72,20 |
80,90 |
77,30 |
75,40 |
76,60 |
|
automobile |
90,90 |
84,00 |
85,50 |
86,90 |
78,60 |
90,00 |
|
bird |
65,40 |
63,30 |
49,80 |
82,10 |
74,00 |
70,20 |
|
cat |
36,80 |
69,90 |
64,70 |
47,20 |
54,30 |
57,10 |
|
deer |
66,20 |
74,80 |
77,00 |
78,20 |
81,30 |
64,60 |
|
dog |
79,40 |
59,80 |
68,30 |
67,40 |
66,70 |
63,60 |
|
frog |
83,20 |
74,00 |
86,60 |
73,90 |
83,50 |
84,20 |
|
horse |
72,30 |
66,40 |
68,40 |
81,30 |
74,80 |
74,60 |
|
ship |
89,00 |
83,60 |
86,20 |
87,90 |
90,50 |
91,10 |
|
truck |
85,70 |
86,80 |
83,80 |
73,70 |
80,50 |
90,20 |
Таблица 3
Cравнение точности по каждому классу набора CIFAR-10 с ResNet20 в различных цветовых пространствах (с аугментацией данных)
|
Имя класса |
RGB, % |
HSL, % |
HSV, % |
LUV, % |
YUV, % |
LAB, % |
|
airplane |
83,10 |
92,70 |
91,60 |
89,40 |
89,40 |
87,50 |
|
automobile |
95,00 |
88,90 |
96,20 |
87,20 |
97,80 |
78,50 |
|
bird |
83,60 |
78,30 |
71,00 |
73,30 |
80,20 |
81,30 |
|
cat |
65,10 |
78,40 |
67,90 |
75,60 |
77,80 |
76,70 |
|
deer |
91,00 |
83,70 |
81,20 |
93,70 |
84,90 |
90,70 |
|
dog |
74,00 |
66,80 |
79,20 |
78,50 |
65,40 |
82,90 |
|
frog |
90,80 |
88,40 |
89,00 |
88,50 |
89,50 |
91,20 |
|
horse |
87,20 |
89,60 |
93,80 |
88,10 |
94,80 |
79,50 |
|
ship |
84,90 |
78,70 |
85,10 |
90,90 |
92,50 |
91,30 |
|
truck |
95,50 |
91,80 |
93,10 |
94,20 |
86,50 |
97,00 |
Таблица 4
Cравнение точности по каждому классу набора CIFAR-10 с CapsuleNet в различных цветовых пространствах (с аугментацией данных)
|
Имя класса |
RGB, % |
HSL, % |
HSV, % |
LUV, % |
YUV, % |
LAB, % |
|
airplane |
86,40 |
84,80 |
83,30 |
81,00 |
81,90 |
86,40 |
|
automobile |
90,42 |
92,50 |
90,30 |
92,50 |
94,20 |
89,50 |
|
bird |
96,90 |
70,90 |
74,30 |
77,00 |
78,00 |
70,80 |
|
cat |
67,40 |
61,70 |
68,50 |
71,20 |
64,40 |
68,00 |
|
deer |
79,40 |
80,00 |
80,30 |
84,00 |
81,30 |
82,20 |
|
dog |
70,20 |
81,90 |
71,90 |
75,10 |
77,10 |
71,50 |
|
frog |
93,10 |
88,20 |
89,70 |
90,40 |
90,90 |
90,20 |
|
horse |
84,90 |
81,80 |
87,00 |
86,00 |
86,30 |
87,90 |
|
ship |
91,50 |
84,70 |
90,40 |
88,00 |
91,20 |
89,00 |
|
truck |
87,50 |
90,00 |
89,90 |
90,20 |
87,80 |
93,90 |
При анализе точности классификации изображений набора данных CIFAR-10 для различных цветовых пространств, обученных с помощью ResNet без аугментации данных, можно заметить, что все модели имеют одинаковое поведение со склонностью к переобучению. В то же время при анализе зависимости величины ошибки от количества эпох обучения модели оказывается, что начиная с десятой эпохи потери все еще падают, но потери на обучающей выборке растут, что является явным признаком переобучения.
Для ResNet20 с аугментацией данных модели менее переобучены, при этом точность на тестовой выборке резко возрастает.
С другой стороны, можно отметить, что CapsuleNet с аугментацией хорошо справляется с задачей и точность на тестовой выборке плавно растет.
Заключение
Проведенный эксперимент показал, что перспективным направлением является использование моделей, которые обучались на наборе данных в RGB, но вместе с тем также способны принимать на вход и классифицировать аналогичное изображение в различных цветовых пространствах с соответствующей структурой данных, а затем переучивать самих себя для того, чтобы получить лучшие результаты распознавания.
Будущие исследования могут заключаться в том, что вместо того, чтобы преобразовывать изображения из цветового пространства sRGB в другое цветовое пространство, можно подавать на вход модели изображения в желаемом цветовом пространстве и использовать соответствующую структуру для хранения данных, чтобы предотвратить потерю информации в процессе преобразования из одного цветового пространства в другое. Это позволит существенно улучшить производительность используемой модели глубокого обучения, но при этом придется также столкнуться с проблемой доступности размеченного набора данных для проведения эксперимента, поскольку большая часть наборов данных с изображениями находится в RGB-пространстве.
Библиографическая ссылка
Денисенко А.А. ГЛУБОКОЕ ОБУЧЕНИЕ ДЛЯ КЛАССИФИКАЦИИ ИЗОБРАЖЕНИЙ В РАЗЛИЧНЫХ ЦВЕТОВЫХ СИСТЕМАХ // Международный журнал прикладных и фундаментальных исследований. – 2020. – № 8. – С. 42-47;URL: https://applied-research.ru/ru/article/view?id=13114 (дата обращения: 23.04.2024).