

Интерес к беспилотным летательным аппаратам (БЛА) типа «Летающая тарелка» нельзя назвать случайным. Они с неменьшим успехом, чем вертолёты, могут выполнять задачи связи, разведки, целеуказания, спасательных работ, и т.п., обладая при этом рядом существенных преимуществ:
● относительно небольшой симметричный разнос масс;
● высокая степень повторения элементов конструкции, что удешевляет их производство;
● относительно малые габариты и защищённые средства создания тяги, вследствие чего очень мала вероятность их повреждения при взлёте-посадке на ограниченные площадки, при полётах над застроенными территориями на малых высотах, между верхушками деревьев и в морских условиях в составе кораблей Военно-Морского Флота;
● Малая вероятность их поломки и разрушения при неспокойной метеорологической обстановке в морских условиях эксплуатации;
● удобство в обслуживании и транспортировке (удобство загрузки и выгрузки) и, что особенно важно, возможность десантирования аппаратов с борта военно-транспортного самолёта или вертолёта;
● значительно больший, чем у вертолётов, ресурс агрегатов.
В современных условиях к задачам военного и гражданского применения аппаратов типа «Летающая тарелка» добавляются новые, в том числе такие, как: обнаружение пострадавших в результате аварий и катастроф на морях и океанах, вертикальное приводнение в район нахождения пострадавших, выпуск спасательного оборудования и средств при нахождении аппарата на плаву, обнаружение и эвакуация пострадавших и при необходимости осуществление вертикального взлета с водной поверхности.
Основные требования к авиационной системе, для доставки спасательных средств
● относительная компактность;
● ветроустойчивость;
● безопасность эксплуатации;
● безопасность доставки спасательных средств и эвакуации пострадавших;
● надежность работы силовой установки и систем в морских условиях;
● возможность наведения спасательных средств по координатам произвольно разбросанных пострадавших на водной поверхности;
● минимальные затраты и степень риска
● снижение риска и затрат на выполнение основных задач.
Общая концепция применяемого беспилотного летательного аппарата
Применяемый в данной разработке беспилотный летательный аппарат выполнен в виде дисковидного двояковыпуклого несущего корпуса. Его аэродинамическая подъемная сила возникает в результате действия центробежного нагнетателя, обеспечивающего обтекание воздушным потоком верхней поверхности корпуса, формообразованной в соответствии с математическим описанием поверхности «Коанда». Реактивная тяга аппарата возникает под действием второго центробежного нагнетателя, установленного внутри дисковидного корпуса, который ускоряет воздушный поток и обеспечивает его центростремительное расширение под корпусом аппарата. Центробежные нагнетатели вращаются турбовальным силовым агрегатом, со свободной турбиной. Силовой агрегат установлен сверху дисковидного корпуса по его вертикальной оси. Он имеет газодинамический и механический приводы на нагнетатели, которые вращаются во взаимнопротивоположном направлении. Внутри дисковидного корпуса содержится модуль оборудования и целевой нагрузки, а внутри модуля содержится объем для размещения спасательного и обеспечивающего оборудования. Изменение величины подъемной силы, управление и перемещения аппарата в пространстве осуществляются в автоматизированном режиме полета отклонениями дополнительного кольцевого крыла, обдуваемого центростремительным потоком воздуха реактивной струи. Развороты аппарата, вокруг вертикальной оси, обеспечивают аэродинамические управляющие поверхности, выдвигаемые в поток из модуля оборудования и целевой нагрузки, в пределах ширины канала, образованного наружным корпусом и поверхностью модуля оборудования и целевой нагрузки.
Особенностями беспилотного летательного аппарата входящего в систему являются:
● Применение в силовой установке турбовального агрегата, который имеет газодинамическую связь с центробежным вентилятором левого вращения и механическую связь с центробежным вентилятором правого вращения, или наоборот.
● Использование наружной поверхности аппарата, сформированной в соответствии с математическим описанием поверхности «Коанда» для создания дополнительной подъемной силы, путем ее обдува потоком воздуха.
● Использование центростремительной реактивной струи воздуха для обдува верхней поверхности дополнительного кольцевого крыла, с целью обеспечения управляемого приращения или уменьшения подъёмной силы.
● Использование подвижного подвеса крыла на эластомерных втулках, скользящего независимо, вдоль специальных направляющих, что позволяет менять углы установки крыла относительно осей X и Z и эффективно управлять аппаратом относительно указанных осей.
● Использование выдвижных, внутри корпуса аппарата, аэродинамических поверхностей управления по курсу и для его разворотов относительно оси Y, позволяет отказаться от выступающих за габариты аппарата элементов.
● Доставка спасательного оборудования и средств к месту разброса пострадавших осуществляется в специальных самоходных контейнерах, подводным путем, в режиме их самонаведения.
● Частичное заполнение водой нижней части несущего корпуса через люк рабочей разгерметизации, позволяет увеличивать остойчивость аппарата, оказывать противодействие качке, нейтрализовать отдачу от импульса при метании спасательных контейнеров и обеспечивает более стабильный вход контейнера в водную среду на границе раздела двух сред.
● Использование кольцевого поплавка с обдуваемой верхней профилированной поверхностью, над которой проходит эжектируемый воздух, кроме повышенной остойчивости, позволяет иметь дополнительную подъемную силу.
● Турбовальный силовой агрегат, установленный коаксиально по оси аэродинамического кольца осевого нагнетателя, обеспечен надежной защитой от залития водой и водяных брызг.
Рассматриваемая конструктивная схема авиационной системы
Технический результат, полученный интеграцией используемых эффектов и особенностей авиационной системы, поясняется чертежами.
Описание конструкции летательного аппарата
Беспилотный летательный аппарат для доставки спасательного оборудования и средств людям терпящим бедствие на водной поверхности, (рис. 1, 2), выполнен в виде герметичного дисковидного двояковыпуклого несущего корпуса 1. Несущий корпус 1 внутри содержит эквидистантно сформированную поверхность 2, смыкающуюся с нижней выпуклой поверхностью 3, что и позволяет выполнить аппарат в герметичном исполнении. Аэродинамическая подъемная сила аппарата возникает в результате ускорения центробежным нагнетателем 4 воздушного потока 5 и истечения воздушной струи из кольцевого сопла 6 над верхней поверхностью корпуса 1, формообразованной в соответствии с математическим описанием поверхности «Коанда». В результате такого обдува линзообразной поверхности несущего корпуса 1, в его верхней части возникает зона пониженного давления с повышенной температурой, а с противоположной, нижней стороны поверхности аппарата 3 – формируется зона повышенного давления, что и приводит к возникновению подъемной силы.
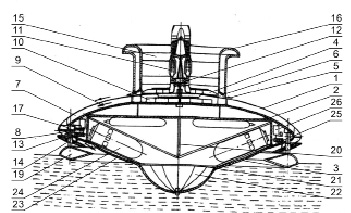
Рис. 1. Вид аппарата сбоку в разрезе на водной поверхности
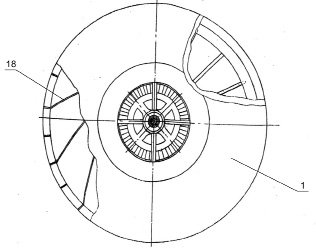
Рис. 2. Вид аппарата сверху
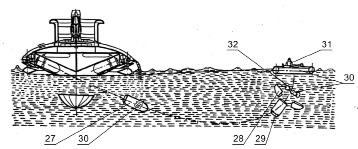
Рис. 3. Схема процесса метания самоходного спасательного контейнера пострадавшему
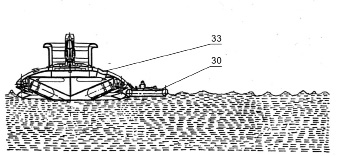
Рис. 4. Движение и причаливание спасательного средства с пострадавшим к летательному аппарату для его предварительного обогрева и ожидания судна внутри ЛА
Внутренняя часть наружной поверхности несущего корпуса 1 и эквидистантно сформированная поверхность 2 установлены с определенным зазором 7 одна относительно другой. Внутри дисковидного несущего корпуса 1 зазор 7 формирует пространственный канал, переходящий в кольцевое сопло 8 аппарата. Разгон и сжатие воздушного потока 9 центробежным нагнетателем 10, установленным внутри дисковидного корпуса 1, обеспечивает его истечение из кольцевого сопла 8, с последующим центростремительным расширением под нижней выпуклой поверхностью 3 аппарата, что и приводит к возникновению реактивной тяги. Эпюры распределения давлений, при этом, позволяют иметь аппарату удовлетворительные характеристики устойчивости в статике и динамике.
Аппарат оснащен турбовальным силовым агрегатом 11 со свободной турбиной 12. Турбовальный агрегат 11 вращает центробежные нагнетатели 4, 10 во взаимнопротивоположном направлении. С нагнетателем 4, турбовальный агрегат 11 соединен газодинамической связью, а с нагнетателем 10 – механической.
Изменение величины подъемной силы, управление и перемещения аппарата в пространстве осуществляются отклонениями дополнительного кольцевого крыла управления 13, обдуваемого потоком воздуха реактивной струи из кольцевого сопла 8. Крыло 13 закреплено подвижно на эластомерных втулках, скользящих независимо, вдоль специальных направляющих 14 аппарата. Такая схема подвески кольцевого крыла управления 13 позволяет его противоположно расположенным частям попеременно, то удаляться, то приближаться к срезу кольцевого сопла 8 центробежного вентилятора 10. В результате меняется интенсивность обдува этих участков кольцевого крыла 13, с соответствующим изменением величины аэродинамических сил. Сам процесс качания кольцевого крыла управления 13 во всем диапазоне его отклонений на заданные углы относительно осей X и Z практически не сказывается на аэродинамике полета аппарата ввиду очень малых относительных значений углов его отклонения.
Силовой турбовальный агрегат 11 закреплен по оси аппарата, над линзообразной поверхностью 1 посредством пилонов 15 в кольцевом обтекателе 16. Во внутренней полости кольцевого обтекателя 16 размещено электронное оборудование, БСАУ, системы навигации, связи, управления и телеметрии.
Развороты аппарата, вокруг вертикальной оси обеспечивают выдвижные в зазор 7 аэродинамические управляющие поверхности 17, установленные на максимальном радиусе эквидистантно сформированной поверхности 2. Они имеют возможность поступательно перемещаться, в радиальном направлении, и в четном количестве связаны с объединенным узлом управления по курсу.
На внутренней поверхности дисковидного несущего корпуса 1, в зазоре 7 расположены лопатки диффузора 18 центробежного вентилятора 10. Нагнетаемый вентилятором 10 в зазор 7 поток воздуха проходит между лопатками диффузора 18, расширяется, преобразуя, таким образом, в соответствии с законом Бернулли, энергию скоростного напора воздуха в энергию давления. Кроме того, закрутка лопаток диффузора 18 обеспечивает движение воздуха, в направлении, позволяющем полностью нейтрализовать действие реактивного момента от силовой установки 11 на конструкцию аппарата.
Достаточная остойчивость и непотопляемость аппарата, при нахождении его на водной поверхности, обеспечивается дисковидным двояковыпуклым несущим корпусом 1 и кольцевым водоизмещающим поплавком 19. Несущий корпус 1, также, как и поплавок 19, выполнены в герметичном исполнении и разделены горизонтальными и вертикальными водонепроницаемыми перегородками 20. В нижней части несущего корпуса 1, на его нижней выпуклой поверхности 3, выполнен люк рабочей разгерметизации 21. В нормальной конфигурации он закрыт сбрасываемым колпаком 22, герметично закрывающим эту часть аппарата. К обрезу люка 21 подходят радиальнорасположенные метательные направляющие 23, которые задают направление при метании самоходных спасательных контейнеров 24.
Бортовое радиоэлектронное оборудование (БРЭО) летательного аппарата
Летательный аппарат оснащен комплексом бортового радиоэлектронного оборудования (БРЭО). В состав БРЭО входят:
1. Бортовая Система Автоматизированного Управления (БСАУ);
2. Бортовой регистратор;
3. Малогабаритная Бортовая Инерциальная Навигационная Система (БИНС);
4. Датчики воздушных скоростей;
5. Барометрический высотомер;
6. Интегральный датчик магнитного поля (компас);
7. Приемник Спутниковой Радио Навигационной Системы (СРНС);
8. Высотомер малых высот;
9. Курсовая видеокамера;
10. Цифровая линия передачи данных и управления;
11. Система локальной координатометрии;
12. Поисковый радиомаяк;
13. Интерфейсный модуль приема/передачи данных с аппаратуры системы управления наведением спасательных средств.
14. Малогабаритная радиолокационная станция (МРЛС), предназначенная для получения радиолокационного изображения водной поверхности днем и ночью, в простых и сложных метеоусловиях.
Комплексируя данные вышеперечисленной аппаратуры с данными приемника (СРНС), вырабатывается полное навигационное решение по координатам и углам ориентации аппарата.
Информационно-логическим центром БРЭО и обработки всей информации принимаемой извне, является бортовой процессор (БП), являющийся принадлежностью БСАУ. Результатом работы БП являются управляющие воздействия на исполнительные органы (сервоприводы) системы управления аппаратом, блок датчиков 26 системы управления наведением 25 спасательных контейнеров 24, команды электронному блоку управления и коммутации энергии, блоку управления силовой установкой, а также телеметрическая информация для передачи по каналам бортового приемо-передающего комплекса.
Блок датчиков 26 системы управления наведением 25, представляет собой телескопическую оптико-электронную мачту с высокочувствительными тепловизорами и видеокамерами. Видеокамеры оснащены автофокусировкой изображения, установлены на гиростабилизированных платформах, с автоматической следящей системой, обеспечивают захват и сопровождение подвижных объектов. Места установки таких устройств, позволяют получать панорамную информацию с обзором на 360 °.
В целом, данный комплекс бортовой аппаратуры позволяет выполнять задачи на основе:
● получения телевизионного, тепловизионного, радиолокационного изображения водных пространств в местах произошедших аварий и катастроф с передачей данной информации на командный пункт в реальном масштабе времени;
● определения координат произвольно разбросанных пострадавших на водной поверхности в автоматическом режиме и по указанию оператора.
● сбора и обработки полетной информации;
Конструкция самоходных спасательных контейнеров
Каждый из самоходных спасательных контейнеров (рис. 3) 24 представляет собой герметичную емкость, цилиндрической формы 27, плавно переходящую в обтекаемые элементы в носовой 28 и хвостовой 29 частях. Хвостовая часть 29 контейнера оснащена водометом с электрическим приводом, рулевыми устройствами и аккумуляторами, активизируемыми в водной среде. В средней цилиндрической части контейнера 27 упаковано средство спасения 30, например лодка или плот в ненадутом состоянии. В носовой части контейнера 28, размещена высокочувствительная система инфракрасного самонаведения и система управления. Задача контейнеров 24 – доставить средства спасения 30 как можно ближе к пострадавшему 31. С целью уменьшения влияния штормовой погоды на доставку средств спасения, доставка их происходит по специальной траектории, непосредственно из глубины под пострадавшего 31.
Стабилизация и управление, самоходным спасательным контейнером 24 при его движении в подводном пространстве, осуществляются автоматически по принципу автопилота. При этом имеются три канала стабилизации: курса, крена и тангажа, а также имеется гидростат, обеспечивающий удержание контейнера на заданной глубине и высокочувствительная инфракрасная система самонаведения. Не исключается радиолокационное самонаведение и наведение корреляционно-экстремальными системами навигации по геофизическим полям Земли. Управление спасательными контейнерами 24 может осуществляться и по проводной связи. Используя эту связь, после прибытия контейнера к пострадавшему, возможно, выполнять подтяг спасательного средства 30 с пострадавшим 31 к борту летательного аппарата.
Работа системы по обнаружению пострадавших
По команде «Тревога», поданной дежурным оператором командного пункта управления, производится ручное включение наземной станции управления БЛА. Одновременно подается электропитание на агрегаты и системы летательного аппарата. Его силовая установка 11 начинает работать. Под действием подъемной силы и тяги силовой установки 11, аппарат отделяется от поверхности земли и уходит с набором высоты. Дальнейшее управление им осуществляется Бортовой Системой Автоматизированного Управления (БСАУ) и команды, необходимые для управления полетом аппарата, подает уже сама БСАУ. После взлета и выдерживания заданной высоты, аппарату, наклоном дополнительного кольцевого крыла управления 13, задается пропульсивная сила, перемещающая его с горизонтальной скоростью к месту морской аварии или катастрофы.
По прибытии и входе в зону бедствия, аппарат замедляет свою скорость, переходит в режим зависания, сохраняя неизменной высоту полета и ориентацию. При этом, он обеспечивает телевизионный, инфракрасный, и радиолокационный съем и передачу данных панорамной обстановки в зоне бедствия. Его навигационная система, совместно с видеоинформаторами и тепловизорами фиксируют свое местоположение над зоной разброса пострадавших. По команде дежурного оператора командного пункта управления, после предупреждения пострадавших из громкоговорителей, производится вертикальная посадка аппарата на водную поверхность в центре некой усредненной зоны разброса пострадавших.
Подготовка к метанию спасательных средств пострадавшим и их эвакуации
Во время нахождения аппарата на водной поверхности, его турбовальный силовой агрегат 11 работает в режиме «малого газа». Определенная глубина погружения корпуса аппарата в водоем, является сигналом для сброса колпака 22, герметично закрывающего зону рабочей разгерметизации 21, находящуюся в нижней части 3 аппарата. После сброса колпака 22, внутренний объем летательного аппарата, ограниченный его нижней, специально спрофилированной частью 3, оказывается частично заполненным водой. При этом частичное заполнение его нижней части 3 водой, значительно увеличивает остойчивость, оказывает противодействие качке, нейтрализует отдачу от импульса при метании спасательных контейнеров и обеспечивает более стабильный вход контейнера 24 в водную среду на границе раздела двух сред.
Метание самоходного спасательного контейнера
По команде оператора или в автоматическом режиме, с учетом метеообстановки и относительного положения аппарата на водной поверхности, из его зоны рабочей разгерметизации 21 производится подводное метание самоходного спасательного контейнера 24. Под воздействием пускового импульса, создаваемого сжатым воздухом на контейнер 24, он отделяется от борта летательного аппарата, и далее под действием тяги своей водометной установки, контейнер 24 следует заданной траектории на заданное удаление. Достигнув некоторого расчетного расстояния до вертикали определяющей нахождение пострадавшего на водной поверхности, по команде системы управления наведением 25, контейнер 24 выполняет маневр в вертикальной плоскости и идет на всплытие. На определенной глубине, по команде системы управления наведением 25, контейнер 24 раскрывается и находящееся в его внутреннем пространстве спасательное средство 30 (надувная лодка или плот специальной конструкции) начинает наполняться сжатым газом, всплывая под пострадавшим 31 и приобретая заданную форму. Пострадавший человек 31 оказывается на борту спасательного средства 30. Некоторые из конструктивных элементов корпуса контейнера 24, при этом, опускаются на тонких тросах в глубину, обеспечивая якорную стабилизацию, и предотвращая опрокидывание средства спасения, другие уходят безвозвратно на глубину.
Спасательное средство 30 (рис. 4), имея гибкую связь 32 с летательным аппаратом в виде тонкого троса, после получения сигнала, что потерпевший на его борту, автоматически выбирает трос, приближаясь по водной поверхности к аппарату, что позволяет при полном приближении к нему, спасенному 31 переместиться во внутрь летательного аппарата через люк 33. У летательного аппарата, все это время, работает силовая установка 11, обеспечивая теплом его внутренний объем.
В некоторых, особых случаях, после перемещения пострадавшего внутрь летательного аппарата, при наличии радиосвязи с ним, возможен взлет летательного аппарата в автоматическом режиме. Для этого, турбовальный силовой агрегат 11 аппарата переводится во «взлетный» режим. Аппарат отрывается от водной поверхности, набирает высоту и в горизонтальной конфигурации полета по сигналам бортовой САУ направляется в зону базирования.
Выводы
Обеспечиваемый технический результат работы авиационной системы для доставки спасательных средств потерпевшим на водной поверхности, заключается в интеграции используемых аэродинамических эффектов и особенностей компоновки аппарата, которые позволяют придать новые свойства классу летательных аппаратов, выполненных по схеме «Летающая тарелка» и использовать подобные аппараты для спасения пострадавших при авариях и катастрофах на морях и океанах.
Одной из особенностей аппарата данной схемы, является его возможность в сложных метеоусловиях зависать на некоторой высоте, а также, длительно находиться на плаву в зоне наблюдения за местом произошедшей аварии или катастрофы, оценивая и передавая на командный пункт сложившуюся обстановку для принятия наиболее оптимального решения по спасению пострадавших.
Описываемый летательный аппарат вертикального взлёта и посадки, предназначен для точной доставки спасательных средств в автоматическом режиме индивидуально, каждому из пострадавших, или группе пострадавших.
Аэродинамическая схема летательного аппарата является безопасной, надежной и эффективной при полетах в условиях турбулентной атмосферы, она ветроустойчива и может быть использована для работы в горных районах, северных широтах, а также в Военно-Морском Флоте России.
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю. АВИАЦИОННАЯ СИСТЕМА ДЛЯ ДОСТАВКИ СПАСАТЕЛЬНЫХ СРЕДСТВ ПОТЕРПЕВШИМ НА ВОДНОЙ ПОВЕРХНОСТИ // Международный журнал прикладных и фундаментальных исследований. – 2015. – № 11-1. – С. 7-13;URL: https://applied-research.ru/ru/article/view?id=7662 (дата обращения: 23.04.2024).