

Освоение нефтегазового потенциала континентального шельфа стало стратегическим направлением развития сырьевой отрасли многих стран. Как следствие, значительно возросло количество подводных сооружений и коммуникаций, требующих периодического, в том числе визуального, мониторинга.
Одним из эффективных способов проведения подводного мониторинга являются использование подводных телеуправляемых осмотровых аппаратов-роботов (ПТОА или ROV – remotely operated underwater vehicle) [1]. В соответствии с отраслевыми требованиями необходимо регулярно проводить дистанционные подводные осмотры судов, трубопроводов, платформ, портовых сооружений и других погруженных объектов, научные и экологические работы. ROV имеет нейтральную плавучесть и управляется по тонкому кабелю с помощью джойстика, при этом он двигается в любом направлении по командам оператора, передавая наверх видео и телеметрическую информацию.
Сверхлегкие подводные аппараты-роботы (вес порядка 3–15 кг) начали появляться в конце 1990-х гг. Аппараты такого класса впервые были инициативно разработаны в ИО РАН в 2000–2001 гг. [2]. Для дальнейшего развития линии сверхлегких ПТОА необходима разработка на базе современных технологий нового поколения таких аппаратов с учетом приобретенного за предыдущие годы опыта их эксплуатации [3].
Целью данной работы является проектирование сверхлегкого аппарата-робота, предназначенного для дистанционного (с поверхности или берега) подводного мониторинга, включающего осмотры подводных объектов снаружи и внутри (например, инспекция состояния труб, шлюзов, платин, водозаборов), проведение поисково-спасательных работ на акваториях, а также научно-исследовательские применения. В новом аппарате значительно усилены имеющиеся конкурентные преимущества ПТОА серии ГНОМ за счет следующих инноваций.
1. В его конструкции использованы пластмасса и композитные материалы вместо металла, что существенно уменьшает вес и исключает дополнительную плавучесть.
2. Важной особенностью является использование автономного источника питания на борту, что уменьшает толщину и увеличивает длину кабеля-связки, делает возможным аварийное всплытие.
3. Аппарат оснащен БНС – бортовой системой навигации для выполнения автоматического движения по заданному курсу и передачи координат аппарата на пульт оператора.
4. Аппарат оснащен GPS для определения координат при движении по поверхности.
5. Имеется возможность установки двух степенного мини-манипулятора и пробоотборника для взятия проб воды и грунта.
6. Аппарат имеет на борту датчики температуры и давления. Также есть канал подключения датчиков электропроводности, PH, сонара.
7. Весьма перспективной представляется возможность удаленного управления по интернету.
Эти инновации позволят сделать аппарат многофункциональным, упростить его конструкцию, снизить затраты на производство.
Создаваемый ПТОА ГНОМ-микро имеет характеристики класса «персонального» аппарата, т.е. такого, который человек может взять с собой, быстро развернуть в рабочее состояние. Это означает компактность (объем порядка 2–4 л), легкий вес (вес самого аппарата порядка 2 кг, вес полного комплекта порядка 12 кг), маршевая скорость – 2–3 узла, простое управление (пульт – джойстик Sony play station) движением под водой. Он должен быть связан с надводным блоком питания и управления с помощью тонкого (толщина не более 3 мм) и гибкого кабеля связи длиной до 120 м, работать на глубинах до 100 м, передавать видеосигнал высокого качества изображения. Также важно отображение на экране данных (телетекст). Камера имеет сервопривод наклона. При этом есть возможность электропитания от источника постоянного напряжения 12 В, 12 АЧ с ресурсом работы не менее 40 мин в среднем режиме мощности. Весь комплект, включая монитор или видео- регистратор, должен размещаться в двух переносных чемоданах типа «дипломат».
В аппарате предусмотрена возможность установки и подключения гидролокатора (сонара) кругового обзора (типа Micron фирмы Tritech или его аналога) с выводом акустического изображения на компьютер.
Материалы и методы исследования
В процессе проектирования проанализированы материалы для изготовления прочного корпуса, корпусов движителей и прочих элементов подводного модуля, работающих под давлением. Учитывая требования по коррозионной стойкости (работа в соленой воде), прочности (способность выдерживать давление воды на глубинах до 50 м), удельному весу, технологичности и экономической целесообразности окончательно выбран сплав АМГ.
В целях минимизации массогабаритных характеристик и энергопотребления выбрана схема движительно-рулевого комплекса на базе трех реверсивных мини-движителей типа ДПР-42 (или аналогов) – двух маршевых и одного вертикального, обеспечивающих три степени свободы передвижения, а также наклонной видеокамерой, существенно расширяющей обзор.
Результаты исследования и их обсуждение
Выполнена конструктивная проработка, включая прочностные расчеты, всех элементов аппарата (рис. 1). Условно подводный модуль можно представить в виде трех основных узлов: прочный корпус, задняя крышка и три практически идентичных корпуса двигателей.

Рис. 1. Сборочный чертеж подводного аппарата
В передней части прочного корпуса, выполненного в виде цилиндра, расположен сферический иллюминатор из оргстекла, сервопривод наклона видеокамеры и сама видеокамера. В центральной части цилиндра устанавливаются платы электроники. По бокам предусмотрены отверстия для крепления маршевых движителей. Снизу установлены защитные полозья, также предназначенные для закладки балласта, компенсирующего разность плотности воды. Задняя крышка состоит из платы электроники, крепления вертикального движителя и гермовводов основного кабеля, датчика глубины и др. В корпусах двигателей для передачи вращающего момента с вала электродвигателя на ось гребного винта применена магнитная муфта собственной разработки, обеспечивающая высокий КПД и надежность работы.
Спроектированная бортовая электроника обеспечивает прием и обработку команд управления, поступающих с надводного блока (пульта оператора) по кабелю-связке, оцифровку и передачу на пульт оператора телеметрической информации – данных от датчиков (компас, датчик глубины и др.) и видеосигнала с камеры. Алгоритм управления аппарата реализован программой (использован язык Си+ и ассемблер), которая записывается и хранится в памяти встроенного микроконтроллера (64-выводной чип AТMega128 фирмы Amtel).
В табл. 1 приведен состав и основные расчетные весогабаритные параметры ПТОА.
Таблица 1
|
Наименование узла или блока |
Габаритные размеры, мм |
Вес в воздухе, кг |
|
Подводный модуль с блоком плавучести |
220х180х150 |
2,8 |
|
Надводный блок питания/управления |
240х220х100 |
3,2 |
|
Кабель коаксиальный РК-50, с кевларовым упрочнением и дополнительной герметичной оболочкой |
диаметр 3 |
1,25 кг на 100 м |
|
Катушка с кабелем 50 м |
190х190х100 |
2 |
|
Транспортировочные кейсы (2 кейса) |
400х350х180 |
2 |
|
Общий вес системы, кг |
18 |
|
Для управления аппаратом используется стандартный переносной пульт – джойстик Sony PlayStation, обеспечивающий простоту и легкость «пилотирования». Блок управления имеет два композитных видеовыхода, предназначенных для подключения встроенного ЖК-монитора и любых других серийных устройств отображения/записи видео информации. Также на блоке управления предусмотрены разъемы для подключения аккумуляторной батареи 12В.
В результате проведения натурных испытаний макета в открытых водоемах (Черное море, Ладога) были протестированы расчетные тактико-технические характеристики ПТОА и системы в целом [4] (табл. 2).
Таблица 2
|
Технические характеристики |
|
|
Максимальная скорость движения вперед, м/с |
до 1,5 |
|
Скорость вертикального движения, м/с |
до 0,3 |
|
Максимальная скорость движения назад, м/с |
До 0,5 |
|
Рабочая глубина, м |
до 50 (ограничена длиной кабеля) |
|
Предельно допустимая глубина, м |
до 100 |
|
Длина кабеля, м |
до 120 |
|
Потребляемая мощность, Вт |
80 |
|
Питание от сети, В |
220 |
|
Питание от автономного источника, В |
12 |
|
Время работы от встроенного аккумулятора 12В, 12Ач, мин |
60 |
|
Влажность окружающей среды, % |
до 100 |
|
Диапазон рабочих температур, °С |
–5…+45 |
Как уже упоминалось, на аппарате предусмотрена возможность установки и интеграции в систему ультразвукового гидролокатора кругового обзора модели Tritech Micron DST Sonar. С его помощью существенно повышается эффективность поисковых операций, этот сонар может освещать подводную обстановку в радиусе до 100 м, позволяя обнаруживать подводные объекты. В табл. 3 приведены технические характеристики гидролокатора.
Таблица 3
|
Технические характеристики |
|
|
Рабочая частота, кГц |
650–950 |
|
Дальность работы, м |
2–75 |
|
Сектор обзора, град |
0...360 |
|
Разрешающая способность, мм |
50 |
|
Угол раскрытия луча (вертикальный), град |
38 |
|
Угол раскрытия луча (горизонтальный), град |
2,5 |
|
Рабочая глубина, м |
до 500 |
|
Параметры питания, пост. напр. |
12–50 В, 4,5 Вт |
|
Габаритные размеры, мм – диаметр – длина |
56 78,5 |
|
Вес, кг: – в воздухе – в воде |
0,29 0,15 |
Для двунаправленной передачи данных телеметрии (с датчиков, гидролокатора и других устройств) через кабель-связку и команд управления аппаратом применена дифференциальная двойная витая пара (интерфейс RS 485), усиленная кевларовой оплеткой с дополнительной герметичной оболочкой.
Все данные телеметрии с гидролокатора отображаются на экране стандартного PC с предустановленной программой Micron Sonar, работающей под Windows. Подключение к PC реализовано посредством COM-порта. Для этого применен преобразователь интерфейса RS 485 → RS 232 ADAM.
Программное обеспечение Micron Sonar позволяет менять параметры работы гидролокатора – угол обзора (360 °, 180 ° или 90 °), радиус осмотра (5–100 м), масштаб, а также вести запись информации на компьютер.
Наличие возможности установки гидролокатора кругового обзора расширяет функции ПТОА ГНОМ-микро, превращая его в поисково-осмотровое средство (рис. 2.) [5, 6]. Кроме того не требуется никаких специальных устройств для записи видеоизображения, так как при наличии на компьютере стандартного устройства видеозахвата запись будет производиться на жесткий диск. При этом сохраняются все отличительные характеристики «персонального» подводного аппарата. Разработанное программное обеспечение обеспечивает несложное управление с беспроводного джойстика Sony PlayStation.
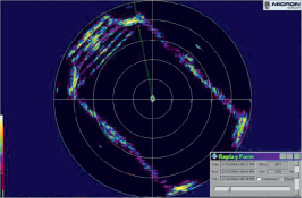
Рис. 2. Отображение объекта на экране РС с помощью гидролокатора (сонара) Micron
Заключение
Использование современной микроэлектроники, миниатюрных видеокамер и новых материалов и технологий позволило спроектировать сверхлегкий подводный телеуправляемый аппарат для широкого круга применений, как научно-исследовательских, так и промышленных. Этот аппарат во многих случаях может полностью или частично заменить использование водолазов при поисковых операциях и осмотрах подводных объектов.
Статья написана в рамках государственного задания ИО РАН по теме № 0149-2018-0011.