

Научные биоэкологические исследования в гидросфере требуют современной аппаратуры, способной проводить широкомасштабные измерения параметров состояния гидросферы и оперативно отслеживать их изменения. Для долговременного мониторинга необходимо создание технических средств с дистанционным управлением и коммуникационными каналами передачи информации.
Стремительное развитие высоких технологий, в том числе компьютерных и телекоммуникационных, позволило приступить к созданию нового поколения исследовательских приборов с мощными встроенными компьютерами и средствами глобальной телекоммуникации, предопределило возможность создания дистанционно управляемых поисково-осмотровых и исследовательских аппаратов-роботов (по международной терминологии – ROV-remotely operated vehicle) и обсерваторий с возможностью объединения их кабельными или спутниковыми каналами [1, 2]. Такие каналы представляют собой подводный сегмент Интернета (или IoT – интернет-вещей). С их помощью можно проводить широкомасштабные измерения гидрофизических и гидрохимических параметров морской воды в реальном времени, исследовать придонную флору и фауну, прослеживать динамику изменений состояния гидросферы. На основе этих станций можно будет создавать сети исследовательских и мониторинговых станций, имеющих в составе измерительные приборы, подводные телеуправляемые аппараты и роботы, соединенные подводным кабелем или поверхностными буями со спутниковой связью. Такие кабели (и/или буи) будут соединены с Интернетом и позволят получать информацию в реальном времени со всех станций и управлять ими. Эти станции постепенно придут на смену эпизодическим исследованиям, проводимым с судов, сделают исследования дешевле и постоянными во времени. Конечно, не следует ожидать, что они скоро покроют весь океан, но вполне реально их использование в первую очередь для научных и экологических исследований прибрежных шельфовых зон. Об этом свидетельствует развитие международных проектов Venus, Neptun, Mars по прокладке сетевых кабелей с узлами для подключения исследовательской подводной аппаратуры вдоль участков побережья США и Европы. Организован международный консорциум из десятков университетов, компаний и фондов. Проводится работа по стандартизации интерфейсов, протоколов связи и систем питания. Первые опытные станции уже развернуты.
Цель данной работы – описание проекта создания программно-аппаратной платформы (ПАП) для удаленной работы со стационарной и мобильной подводной аппаратурой, решающей задачу периодического и долговременного мониторинга.
Рассматриваются два возможных варианта ПАП.
1. Установка внешнего блока для уже существующих аппаратов, например модернизация отечественного телеуправляемого подводного аппарата (ТПА) ГНОМ [3].
2. Использование встроенного бортового модуля для новой серии аппаратов Супер ГНОМ-ПРО.
Методы и материалы. Описание системы
Платформа является своего рода шлюзом или мостом, обеспечивающим канал связи между удаленным оператором и самим аппаратом по сети Интернет. Комплекс ТПА имеет в составе собственно подводный аппарат, кабель-связку и надводную станцию управления (размещается на судне-носителе или на берегу). По кабелю-связке подается питание на аппарат и идет обмен данными по дуплексному каналу (в одну сторону – команды управления, а в другую – телеметрия с датчиков). Скорость потока данных доходит до 50 Мбит/c. В серии малых аппаратов-роботов ГНОМ, сконструированных и выпускаемых Институтом океанологии РАН и компанией ООО Индэл-Партнер, в качестве кабеля-связки используется коаксиальный кабель с волновым сопротивлением 50 Ом, по которому передаются смешанный сигнал питания, видео (композит) и телеметрия [4]. В надводной станции имеется электронный блок на базе микроконтроллера Atmega128, который принимает с джойстика команды оператора и транслирует их по кабелю в подводный аппарат, а данные телеметрии с аппарата принимает и преобразовывает в телетекст (алфавитно-цифровые данные, отрисованные поверх видеокартинки) и пересылает их в компьютер через USB-порт.
На рис. 1 представлены состав оборудования и схема работы с удаленным доступом для мониторинга состояния подводных частей платформы.
ТПА ГНОМ находится в подводном положении, он соединен кабелем-связкой с управляющим станцией пультом оператора, находящимся на морской нефтедобывающей платформе. В составе станции имеется аппаратура ПАП с программой СЕРВЕР в виде отдельного блока, который соединен с COM портом управляющего компьютера. ТПА ГНОМ, имеющий на борту видеокамеры, может обследовать состояние опор нефтяных платформ, при этом пилот-оператор находится в любом месте и управляет аппаратом через Интернет с помощью программы КЛИЕНТ, разработанной в данном проекте, и получает видео и телеметрию (в зависимости от качества канала возможны задержки). Программа СЕРВЕР принимает данные от оператора по сети, переформатирует их в команды аппарата и пересылает через кабель-связку в бортовой модуль ТПА. Связь с ТПА производится через специальный модем (на основе ЧМ-модуляции) по витой паре кабеля. Длина кабеля может доходить до 400 м, скорость потока – до 50 Мбит/с. Этот интерфейс и программа коммуникации «оператор – борт» разработаны в данном проекте.
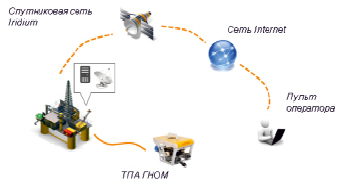
Рис. 1. Схема работы с удаленным оператором. Мониторинг состояния морской нефтедобывающей платформы
ТПА сможет использоваться для решения научных и экологических задач, а именно осуществлять:
– подводные видеонаблюдения и научные исследования (измерения гидрофизических и гидрохимических параметров воды) как в прибрежных водах России, так и в Мировом океане;
– идентификацию видов морской фауны и флоры, токсических и вредоносных форм водорослей и простейших;
– экологический мониторинг дна и искусственных сооружений типа нефтяных платформ, трубопроводов, а также затонувших судов и потенциально опасных объектов (контейнеров с радиоактивными отходами, затопленных судов со снарядами, химоружием и т.д.);
– исследование природных и антропогенных чрезвычайных ситуаций в морских акваториях;
– обследование дна и придонного слоя при прокладке трубопроводов, кабелей и т.д.
Разработан действующий опытный образец ПАП – универсальный шлюз для коммуникаций между существующими ТПА и сетью. Это принципиально новый инструмент для проведения подводных исследований, представляющий собой телеуправляемый комплекс с возможностью работы как с судов, так и с морских сооружений типа нефтедобывающих платформ, а также в составе подводной информационно-управляющей сети.
ТПА оснащен движительным винто-моторным комплексом, высокочувствительными видеокамерами высокого разрешения с осветителями, измерительными датчиками гидрофизических и гидрохимических параметров морской воды, гидролокационными средствами высокого пространственного разрешения, манипулятором для отбора проб (воды, биомассы, грунта), необходимым набором навигационных датчиков (глубины, курса), системой определения координат, а также имеется возможность установки устройств навесного типа, например измерителей гамма-излучения, магнитометра и др.
Важным отличием от существующей аппаратуры является вышеупомянутая возможность работы в следующих режимах:
1) в режиме управления оператором с поверхности;
2) в подводной кабельной сети (международные проекты Venus, Mars, Neptun);
3) через поверхностные буйковые станции [5].
Выводы
Предложен и проработан проект гибридного интернет-управляемого поисково-осмотрового комплекса (рис. 2) на базе безэкипажного катамарана и спускаемого ТПА. Оператор удаленно управляет ТПА системой через Интернет, на берегу устанавливается антенна-усилитель Wi-fi. Радиус действия радиоканала – 1–1,5 км. В качестве безэкипажного катамарана предполагается использовать разработку компании Evologics Sonebot (Германия).
Конструкция (рис. 3) выполнена в виде несущей полипропиленовой рамы, герметичных прочных корпусов с крышками с гермоводами с задней стороны и иллюминаторами для видеокамеры (видеокамер) спереди.
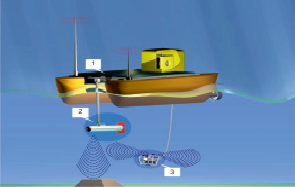
Рис. 2. Катамаран со средствами ориентации и ТПА: 1 – беспилотный полуавтономный катамаран; 2 – гидролокатор бокового обзора; 3 – ТПА
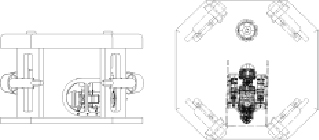
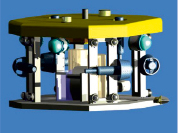
Рис. 3. Общий вид и конструкция ПАП (модель)
Внутри корпусов размещены источник и преобразователь питания, блок электроники и электронный компас, а также датчик глубины, мембрана которого выходит наружу на задней крышке.
Подводная платформа приводится в движение шестью движителями, жестко закрепленными на раме: четырьмя горизонтальными, двумя вертикальными.
Кроме того, на раме могут быть дополнительно установлены кластеры светодиодных осветителей (количество может варьироваться), манипулятор, гидролокатор кругового обзора, набор датчиков для сбора информации (температуры, солености и т.п.).
Для придания подводному модулю плавучести, близкой к нейтральной, на раму устанавливается блок плавучести.
Платформа связана с доковой станцией кабелем, по которому подаются электропитание, команды управления и телеметрия – данные с измерительных датчиков и гидроакустических приборов и видеопоток с камер.
Статья написана в рамках темы Госзадания № 0149-2019-0012. «Технологии широкого спектра наблюдений в гидросфере на базе подводных робототехнических комплексов, обитаемых аппаратов и систем: разработка подводных аппаратов и роботизированных систем телеуправляемых платформ с сетевой архитектурой для мониторинга гидросферы, в том числе на предельных глубинах в Мировом океане».